通信電纜 網絡設備 無線通信 云計算|大數據 顯示設備 存儲設備 網絡輔助設備 信號傳輸處理 多媒體設備 廣播系統 智慧城市管理系統 其它智慧基建產品

上海蘇嵩自動化設備有限公司

上海蘇嵩自動化設備有限公司
西門子PLCs7-300開關量模塊
PLC產品包括LOGO,S7-200(CN),S7-1200,S7-1500, S7-300,S7-400,TDC,工業網絡,HMI人機界面,工業軟件等。 西門子S7系列PLC體積小、速度快、標準化,具有網絡通信能力,功能更強,可靠性更高。西門子S7300plc代理商,西門子代理商,西門子總代理,,西門子電機總代理,
6ES7 321-1FH00-0AA0 6ES7 321-1FH00-0AA0
===================================================================================
西門子PLCs7-300開關量模塊 西門子PLCs7-300開關量模塊
某控制系統有3臺電機,當按下起動按鈕SB1時,潤滑電機起動;運行10s后,主電機起動;運行20s后,冷卻泵電機起動。當按下停止按鈕SB2時,主電機立即停止;主電機停5s后,冷卻泵電機停;冷卻泵電機停5s后,潤滑電機停。當任一電機過載時,3臺電機全停。
2.I/O分配
輸入信號:起動SB1-X0;
停止SB2-X1;
*臺電機的過載保護-X2(接常閉觸點);
第二臺電機的過載保護-X3(接常閉觸點);
第三臺電機的過載保護-X4(接常閉觸點)。
輸出信號:潤滑電機-Y0;
主電機-Y1;
冷卻泵電機-Y2。
3.程序設計
該控制系統是典型的順序起動,逆序停止控制。其程序如下圖所示。
1.控制要求
2.I/O分配 正轉起動按鈕SB1—X0; 停止按紐SB3—X2; 輸出信號: 反轉交流接觸器KM2—Y1。 若PLC的輸入點較富裕,則熱繼電器的常閉觸點可占用PLC的輸入點,見下圖(a);若輸入點較緊張,則熱繼電器的信號可不輸入PLC,而直接接在PLC外部的控制電路中,見下圖(b)。

(a)熱繼電器觸點接入PLC中(b)熱繼電器觸點不接入PLC中
圖 電動機正反轉控制I/O接線圖
電動機正反轉控制程序如下圖所示。

圖 正反轉程序
PLC控制系統是由繼電器控制系統和計算機控制系統發展而來的,與傳統的繼電器控制系統相比,主要不同表現在以下幾個方面。
(1)繼電器控制系統采用許多硬器件、硬觸點和“硬”接線連接,組成邏輯電路實現邏輯控制要求,而且易磨損、壽命短。而PLC控制系統內部大多采用“軟”繼電器、 “軟”接點和“軟”接線連接,其控制邏輯由存儲在內存中的程序實現,且無磨損現象,壽命長。
(2)繼電器控制系統體積大、連線多,PLC控制系統結構緊湊、體積小、連線少。
(3)改變繼電器控制系統功能需拆線、接線乃至更換元器件,比較麻煩。而改變PLC控制功能,一般僅修改程序即可,極其方便。
(4)繼電器控制系統中硬繼電器的觸點數量有限,用于控制用的繼電器觸點數一般只有4~8對,而PLC每只軟繼電器供編程用的觸點數有無限對,使PLC控制系統有很好的靈活性和擴展性。
(5)在繼電器控制系統中,為了達到某種控制目的,要求安全可靠,節約觸點用量,因此,設置了許多制約關系的連鎖環節。在PLC中,由于采用掃描工作方式,不存在幾個并列支路同時動作的因素,因此,設計過程大為簡化,可靠性增強。
(6) PLC控制系統具有自檢功能,能查出自身的故障,隨時顯示給操作人員,并能動態地監視控制程序的執行情況,為現場調試和維護提供了方便。
(7)定時控制,繼電器控制邏輯利用時間繼電器進行時間控制。一般來說,時間繼電器存在定時精確度不高、定時范圍窄、易受環境濕度和溫度變化的影響、時間調整困難等問題。PLC使用半導體集成電路做定時器,時基脈沖由晶體振蕩器產生,精度相當高,且定時時間不受環境的影響,定時范圍一般從0.001s到若干天或更長,用戶可根據需要在程序中設置定時值,然后由軟件來控制定時時間。
從以上幾個方面的比較可知,PLC在性能上優于繼電器,控制邏輯優異,特別是具有可靠性高,設計施工周期短,調試修改方便的特點,而且體積小、功耗低、使用維護方便。但在很小的系統中使用時,價格要高于繼電器控制系統。
1多功能測量表SENTRON PAC3200簡介
SENTRON PAC3200電能監視設備可精確提供系統特性,包括電壓和電流大值、小值和平均值,功率值、頻率、功率因數、對稱性、邏輯計算、負載趨勢、諧波和總諧波失真等。SENTRON PAC3200可檢測 50 多個基本數值,具有 10個電能計數器,可用于全面負載檢測。它們的測量準確度滿足電能計數器標準所規定的較高要求。PAC3200帶有MODBUS RTU-RS485接口、PROFIBUS-DP接口和MODBUS TCP 接口,可以很方便將PAC3200的數據上傳到PLC中進行處理,也可以上傳到HMI中進行數據分析、處理及歸檔。對于西門子系統可以輕松地將PAC3200集成到上位自動化系統中,例如,集成到西門子 SIMATIC PCS 7 powerrate 和SIMATIC WinCC powerrate 軟件包中。
2 PAC3200通信接口對比
PAC3200可以通過MODBUS RTU RS485接口、MODBUS TCP 以太網接口以及現場總線PROFIBUS-DP接口與PLC和HMI通信。下面分別以連接S7-300 PLC為例,在通信性能、連接的個數、編程方面進行對比:
1) 通信性能:PROFIBUS-DP使用令牌方式由主站依次訪問從站,是實時現場總線,通信響應快,通信的響應時間應考慮PAC3200數據的刷新時間(自身刷新時間可能較PROFIBUS-DP刷新時間慢);如果選擇以太網MODBUS TCP 通信,由于不是實時網絡,通信性能次之,通信的響應時間也應考慮PAC3200數據的刷新時間(自身刷新時間可能較以太網刷新時間慢);使用RS485 MODBUS RTU通信,由于基于串口,通信性能不能與以太網與PROFIBUS-DP相比較。
2) 連接個數:使用PROFIBUS-DP,基于主站的性能,多可以連接126個站點;以太網MODBUS TCP 通信,基于CP的連接個數,通常16個;使用RS485 MODBUS RTU,可以連接一個網段,典型值31個站點。
3) 編程:使用PROFIBUS-DP,不需要編寫通信程序;使用以太網MODBUS TCP 通信,需要編寫發送接收通信程序;使用RS485 MODBUS RTU通信,需要編寫從站輪詢程序,比較麻煩,如果沒有購買MODBUS RTU的驅動,還需要編寫通信程序。
4) 價格:PROFIBUS-DP與RS485 MODBUS RTU通信需要購買選件網卡,而PAC3200本身集成以太網接口,支持MODBUS TCP 通信。
下面將介紹PAC3200的MODBUS TCP 通信。
3 MODBUS TCP 通信報文
MODBUS TCP 使MODBUS RTU協議運行于以太網,MODBUS TCP使用TCP/IP和以太網在站點間傳送MODBUS報文,MODBUS TCP結合了以太網物理網絡和網絡標準TCP/IP以及以MODBUS作為應用協議標準的數據表示方法。MODBUS TCP通信報文被封裝于以太網TCP/IP數據包中。與傳統的串口方式,MODBUS TCP插入一個標準的MODBUS報文到TCP報文中,不再帶有數據校驗和地址,如圖1所示:
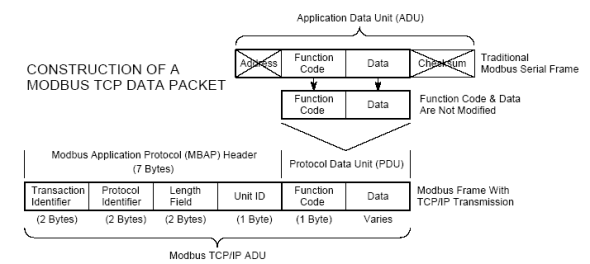
圖1 MODBUS TCP報文
由于使用以太網TCP/IP數據鏈路層的校驗機制而保證了數據的完整性,MODBUS TCP 報文中不再帶有數據校驗”CHECKSUM”,原有報文中的“ADDRESS”也被“UNIT ID”替代而加在MODBUS應用協議報文頭中。
MODBUS TCP服務器使用502端口與客戶端進行通信。
S7-300 與PAC3200 之間進行MODBUS TCP 通信時,MODBUS應為協議的報文頭賦值如下:
byte 0: transaction identifier (高字節) – 為0
byte 1:transaction identifier(低字節) - 為0
byte 2:protocol identifier(高字節) = 0
byte 3:protocol identifier (低字節) = 0
byte 4:length field (高字節) = 0 (因為所有的報文小于256)
byte 5:length field (低字節) = 后面跟隨的字節數
byte 6:unit identifier -原從站地址,這里為0
byte 7:MODBUS 功能碼,通過功能碼發送通信命令
byte 8 ~:后續的字節數與功能碼相關
4 PAC3200支持的MODBUS TCP 功能碼
在MODBUS TCP 的報文中,通過使用功能碼請求通信伙伴的數據,如對內部寄存器的讀寫操作、讀輸入寄存器、寫輸出寄存器等。不同的操作使用不同的功能碼,如FC1、2、3、4、5、6、7、15、16等,PAC3200支持FC2、FC3、FC4、FC6、FC16,在下面將介紹PAC3200這些功能碼的報文格式:
FC2 讀輸入的位信號:
請求:
Byte 0: 功能碼,2
Byte 1-2: 開始的位地址
Byte 3-4:位的個數 (1-2000)
響應:
Byte 0: 返回的功能碼 2
Byte 1: 返回的字節個數 (B=(位的個數+7)/8)
Byte 2-(B+1): 位信號的值 (低有效位是*個位信號)
FC3 讀多個寄存器信號:
請求:
Byte 0: 功能碼,3
Byte 1-2: 寄存器開始地址
Byte 3-4: 寄存器的個數 (1-125)
響應:
Byte 0: 返回的功能碼 3
Byte 1: 返回的字節個數 (B=2倍寄存器數)
Byte 2-(B+1): 寄存器的值
FC4 讀輸入寄存器信號:
請求:
Byte 0: 功能碼,4
Byte 1-2: 輸入寄存器開始地址
Byte 3-4: 輸入寄存器的個數 (1-125)
響應:
Byte 0: 返回的功能碼 4
Byte 1: 返回的字節個數 (B=2倍輸入寄存器數)
Byte 2-(B+1): 輸入寄存器的值
FC6 寫單個寄存器信號:
請求:
Byte 0: 功能碼,6
Byte 1-2: 寄存器地址
Byte 3-4: 寄存器的值
響應:
Byte 0: 返回的功能碼 6
Byte 1-2: 寄存器地址
Byte 3-4: 寄存器的值
FC16 寫多個寄存器信號:
請求:
Byte 0: 功能碼,10(HEX)
Byte 1-2: 寄存器開始地址
Byte 3-4: 寄存器的個數 (1-100)
Byte 5:字節的個數 (B=2倍輸入寄存器數)
Byte 6-(B+5) 預置的寄存器值
響應:
Byte 0: 返回的功能碼 10(HEX)
Byte 1-2: 寄存器開始地址
Byte 3-4: 寄存器個數
您感興趣的產品PRODUCTS YOU ARE INTERESTED IN







智慧城市網 設計制作,未經允許翻錄必究 .? ? ?
請輸入賬號
請輸入密碼
請輸驗證碼







