通信電纜 網絡設備 無線通信 云計算|大數據 顯示設備 存儲設備 網絡輔助設備 信號傳輸處理 多媒體設備 廣播系統 智慧城市管理系統 其它智慧基建產品

上海地友自動化設備有限公司

上海地友自動化設備有限公司
西門子變頻器6SL3320-1TE33-1AA3 S120 單電機模塊 輸入:600V DC 輸出:400V 三相交流,310A 結構形式:裝機裝柜型 內部風冷 支持擴展 安全集成功能 包括 DRIVE-CLiQ 導線
西門子變頻器6SL3320-1TE33-1AA3 S120 單電機模塊 輸入:600V DC 輸出:400V 三相交流,310A
上圖中的3和4說明了兩種特殊情況下軸的回原點的過程。
下圖以4種情況來說明軸以“負方向”和“下側”的方式主動回原點的過程。


被動
被動回原點指的是:軸在運行過程中碰到原點開關,軸的當前位置將設置為回原點位置值。

西門子變頻器6SL3320-1TE33-1AA3 S120 單電機模塊 輸入:600V DC 輸出:400V 三相交流,310A
①輸入原點開關:參考主動會原點中該項的說明。
②選擇電平:參考主動回原點中該項的說明。
③參考點開關一側:參考主動回原點中第5項的說明。
④參考點位置: 該值是MC_Home指令中“Position”管腳的數值。
用例子說明如何實現一個被動回原點的功能:
步驟一:在上圖中選則“參考點開關一側”為“上側”;
步驟二:先讓軸執行一個相對運動指令,該指令設定的路徑能讓軸經過原點開關;
步驟三:在該指令指令的過程中,觸發MC_Home指令,設置模式為Mode=2.
步驟四:這時再觸發MC_MoveRelative指令,要保證觸發該指令的方向能夠經過原點開關。
『結果』當軸以MC_MoveRelative指令的速度運行的過程中碰到原點開關的有效邊沿時,軸立即更新坐標位置為MC_Home指令上的“Position”值,如下圖所示。在這個過程中軸并不停止運行,也不會更改運行速度。直到達到MC_MoveRelative指令的距離值,軸停止運行。

『結論』
1. 被動回原點功能的實現需要MC_Home指令與MC_MoveRelative指令,或MC_MoveAbsolute指令,或是MC_MoveVelocity指令,或是MC_MoveJog指令聯合使用。
2. 被動回原點需要原點開關。
3. 被動回原點不需要軸不執行其他指令而專門執行主動回原點功能,而是軸在執行其他運動的過程中完成回原點的功能。
S120 單電機模塊 輸入:600V DC 輸出:400V 三相交流,310A
命令表功能為用戶提供了另外一種軸控制的解決方案。 用戶不需要組態TO_PositioningAxis對象,而直接使用命令表。
『注意』目前為止,只有S7-1200 PTO 控制方式可以使用命令表功能,PROFIdrive和模擬量控制方式都不支持命令表功能。
多可以添加32條命令條目。
“工藝對象:命令表”和“工藝對象:軸”是同等級別的工藝對象,也就是說,客戶可以只插入“工藝對象:命令表”,也可以只插入“工藝對象:軸”,或是同時插入兩個工藝對象。
軸有一個或多個固定運行路徑的應用情況下可以使用命令表。使用組態命令表,讓軸按照設定好的曲線路徑運行。
插入工藝對象TO_CommandTable的過程,如下圖所示:

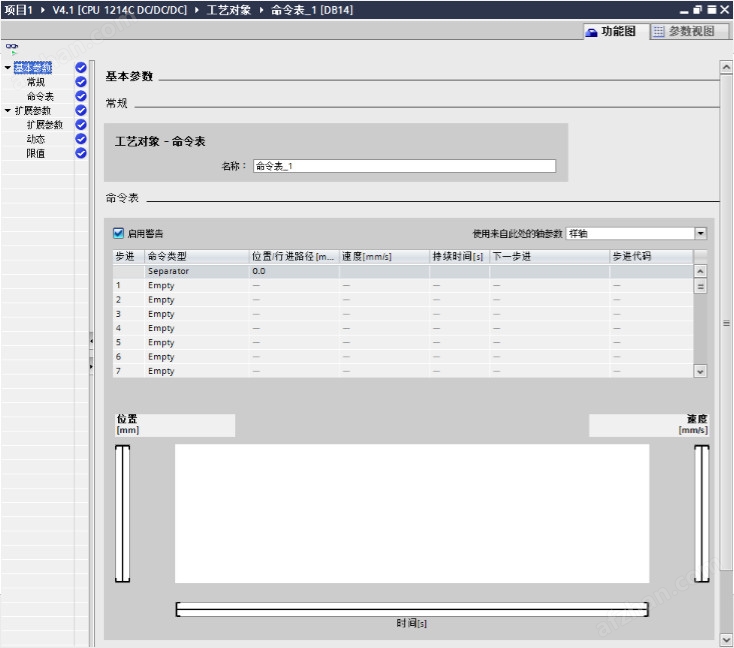
插入命令表成功后,可以看到下圖的命令表參數配置視圖。命令表參數包括:基本參數和擴展參數。 如下圖所示,命令表的結構。
S120 單電機模塊 輸入:600V DC 輸出:400V 三相交流,310A
您感興趣的產品PRODUCTS YOU ARE INTERESTED IN


智慧城市網 設計制作,未經允許翻錄必究 .? ? ?
請輸入賬號
請輸入密碼
請輸驗證碼





